歩くという最小単位の意思決定


「歩く」という行為は、あまりに当たり前すぎて、その仕組みを意識することはほとんどない。
しかし、その一歩を分解してみると、人間の身体がいかに合理的に設計されているかが見えてくる。
例えば人は1日平均で5,000〜10,000歩、生涯では約1億〜2億歩歩くと言われている。
つまり歩行は、人生の中で最も繰り返される無意識な“意思決定”の一つだ。
本記事では、歩行を5つの観点から解きほぐし、「なぜ人は効率よく動けるのか」を読み解く。
1. 歩くとは「意図的な不安定」である
歩行の本質は、「安定の維持」ではなく「不安定の活用」にある。
人は通常、支持基底面(足で支えられる範囲)の中に重心を収めることで安定を保つ。
このとき重心が支持基底面内にある限り、理論上は転倒しない。
しかし歩行時は、その重心をあえて外に出す。
重心は前方へ数センチ単位で移動し、身体は“制御された転倒状態”に入る。
これにより身体は前方に倒れようとし、その結果として足が出る。
いわゆる「モーメンタム戦略」だ。
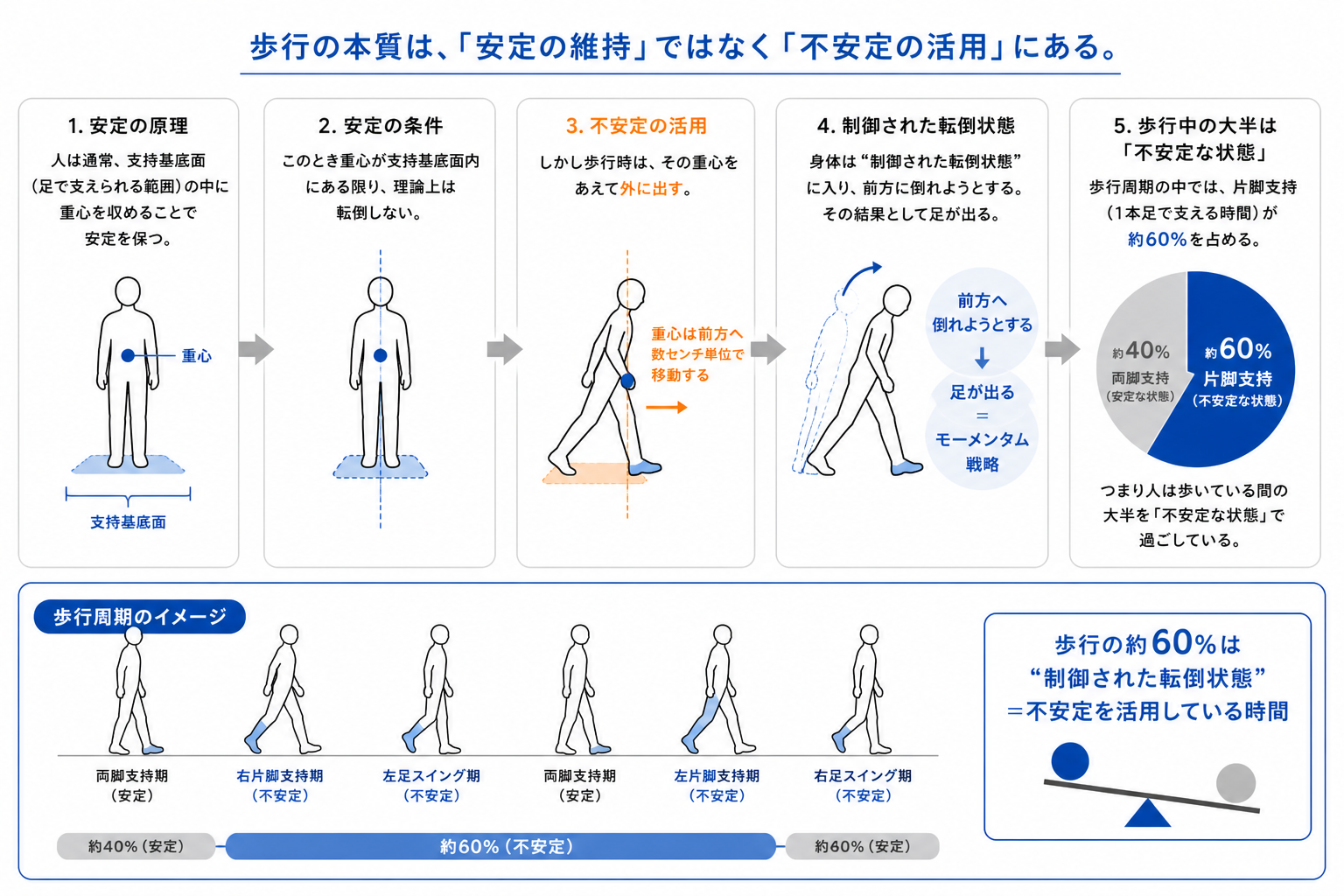
歩行周期の中では、片脚支持(1本足で支える時間)が約60%を占める。
つまり人は歩いている間の大半を「不安定な状態」で過ごしている。
一方で、高齢者などに見られる「重心を外さない歩行」は、安全性を優先した結果だが、推進力を失いやすい。
つまり歩行とは、
リスクを最小化しつつ、あえて不安定を取り入れる最適化行動と言える。
2. 衝撃吸収は「膝カックン」で成立する
歩行時、身体には体重の約1.2倍の衝撃がかかる。
体重60kgの人であれば、1歩ごとに約72kgの負荷。
これが1日1万回繰り返されることで、関節には膨大な“反復ストレス”が蓄積される。
この負荷を分散する中核が、膝の微細な屈曲運動だ。
いわば「膝カックン」を一歩ごとに繰り返すことで、衝撃は分散され、関節へのダメージが最小化される。
着地後、膝が約10〜15度程度わずかに曲がることで衝撃を吸収する。
この動きがなければ、負荷はそのまま関節や骨に伝達される。
特に、膝が伸び切った状態(反張膝)では、この吸収機構は機能しない。
注目すべきは、この動きが非常に小さいにもかかわらず、長期的には大きな差を生む点だ。
1日1万歩、年間で約365万歩。
この反復の中で、
「数度の可動域の差」が関節寿命を左右する。
3. 歩行は「転がり運動」である
歩行は、筋力で押し出す運動ではない。
むしろ、足裏の構造を使った「転がり運動」と捉える方が本質に近い。
かかと接地から始まり、
- ヒールロッカー(かかと)
- アンクルロッカー(足首)
- フォアフットロッカー(指の付け根)
- トゥーロッカー(つま先)
という4段階の支点移動によって、身体は前方へとスムーズに移動する。
この一連の動きの中で、足首は約10度前後の背屈、つま先では約50〜60度の底屈が生じる。
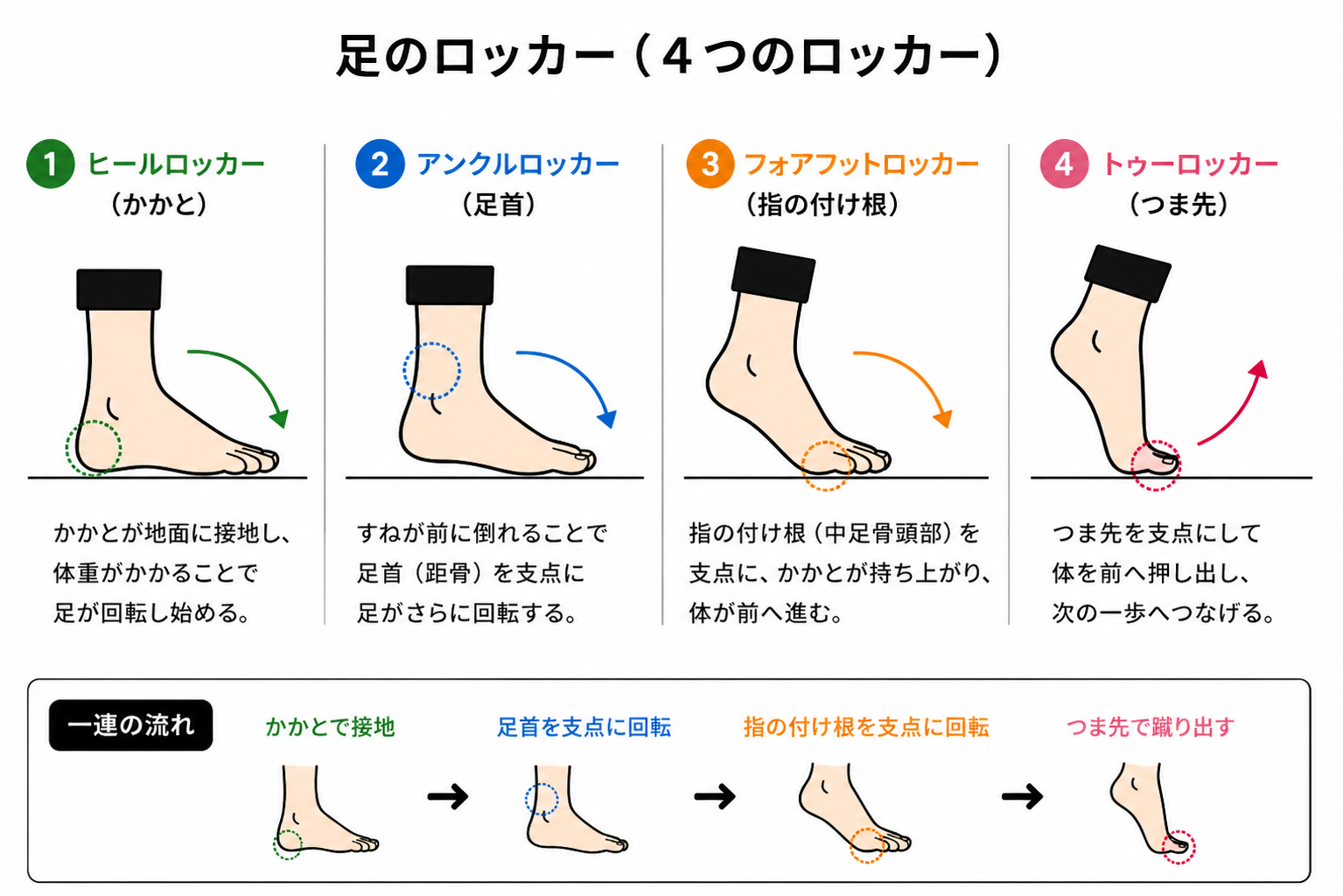
これにより身体は連続的に前方へ「転がる」。
このプロセスの本質は、衝撃を「受け止める」のではなく、
前進エネルギーへと変換する点にある。
結果として、歩行時のエネルギー消費はランニングの約1/3〜1/2程度に抑えられる。
4. 歩行には「最適速度」が存在する
歩行には、エネルギー効率が最も高くなる速度帯が存在する。
一般的には、時速約4.8km(秒速1.33m)前後。
※これはあくまで街中を歩く人全体の平均値で、身長や歩幅によって前後します。
このときの歩幅は約65〜75cm、歩行ピッチは1分間に約100〜120歩程度になる。
この条件が揃ったタイミングこそが、いわゆる一番疲れない「魔法のスピード」だ。
この速度ではロッカー機能が自然に働き、無駄なエネルギー消費が抑えられる。
逆に、
- 遅すぎる(秒速1.0m未満) → 機能が活かせず非効率
- 速すぎる(時速6km以上) → エネルギー消費が急増
という状態になる。
興味深いのは、競歩のように「常に片足接地を維持しながら速く進む」動作が、
生理的には極めて高負荷になる点だ。
つまり歩行は、
速度というパラメータに強く依存する最適化システムでもある。
5. 動物界トップクラスの持久力を持つ人間
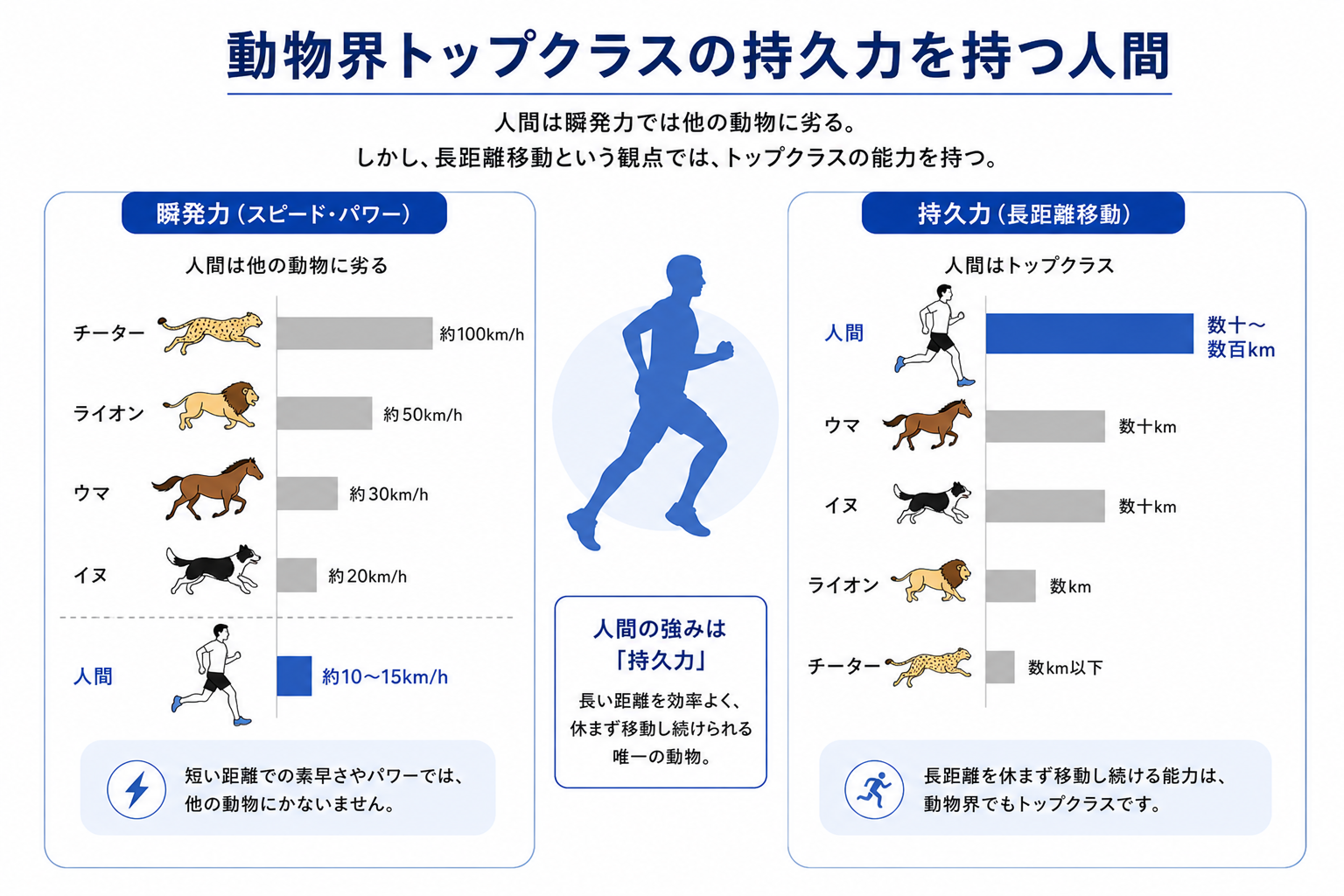
人間は瞬発力では他の動物に劣る。
しかし、長距離移動という観点では、トップクラスの能力を持つ。
その理由は、二足歩行のエネルギー効率にある。
- 重心の上下動:約5cm前後に抑制
- エネルギー再利用(振り子運動):効率は約60〜70%
- 上半身の安定化により視覚・判断能力を維持
これらの仕組みにより、人間は長時間・長距離の移動を可能にしている。
狩猟採集時代には、1日20〜40kmの移動が一般的とされる。
現代でもフルマラソン(42.195km)や、100kmを超えるウルトラマラソンが成立している。
つまり人間の身体は、
「速く動く」よりも「長く動き続ける」ことに最適化されている。
まとめ:歩行は「効率の塊」である
歩行は単なる移動手段ではない。
そこには、
- 不安定を利用した推進(片脚支持 約60%)
- 微細な衝撃吸収(膝屈曲 10〜15度)
- 構造によるエネルギー変換(効率60〜70%)
- 速度による最適化(時速4.8km)
といった複数の合理性が組み合わさっている。
そして最も重要なのは、
そのすべてが「無意識」に行われているという点だ。
人は1日に数千回、この最適化を繰り返している。
歩行を理解することは、
人間というシステムの設計思想を理解することにほかならない。